Are you aspiring to become a roboticist? Robots are undeniably fascinating, but enthusiasm alone doesn't provide a clear path forward. While movies and games offer great inspiration, they're not substitutes for real education. True robotics focuses on creating reliable systems that perceive the world and interact with physical realities.
Robotics is a cyber-physical discipline, blending software and hardware into seamless machines. It's the intersection of computer science, electrical engineering, mechanical engineering, and perception technologies. Embracing its interdisciplinary nature simplifies your learning journey significantly.
Robotics is hardware, software, and perception. Many beginners falter by attempting to master everything simultaneously. A smarter strategy is to develop proficiency in a core set of fundamentals that appear in nearly every robotics project. Here are five essential foundations to propel you forward.
1) Operating Systems for Robotics
In robotics, the operating system manages processes, device access, drivers, and networking. Linux is the most common choice, with many popular distributions to choose from. For example, Ubuntu is especially widespread in robotics tooling and vendor platforms. If you can navigate the terminal, install packages, manage permissions, and understand basic services, you will be comfortable on most real robotics stacks. However, it should be noted that not all robots need operating systems. If your robot only features a microcontroller rather than a microprocessor, you would not be running a full-scale operating system, file system, or other common features you would expect from a computer.
2) Programming for Robotics: Python and C++
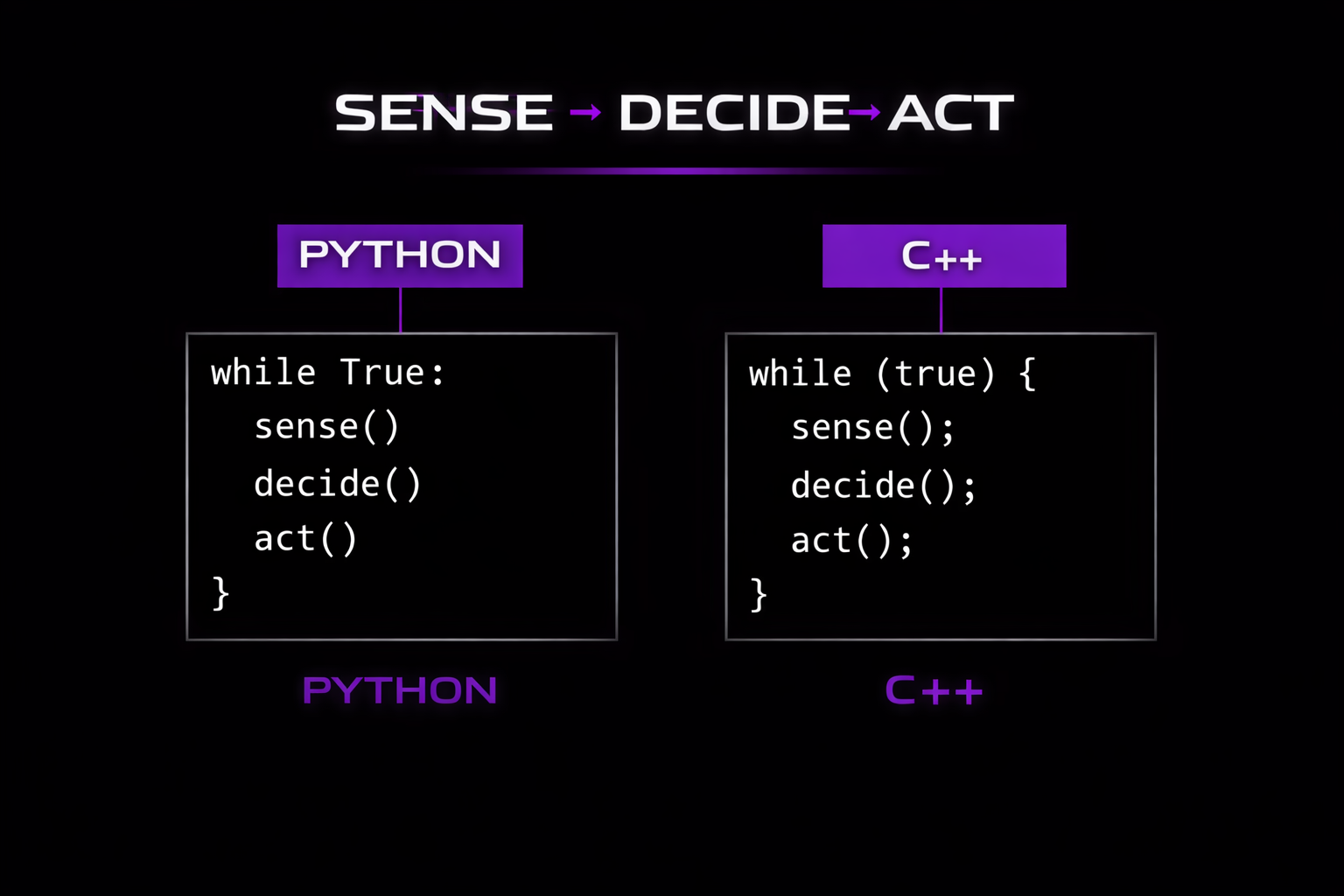
Robots do what you code. Programming is how you turn intent into behavior loops. Python is a strong first language because you can move fast and learn the basics without a lot of friction. C++ becomes important when performance and timing matter. A practical path is to prototype in Python, then learn C++ as your projects demand speed and reliability.
3) Robotics Electronics: Sensors, Power, and Communication
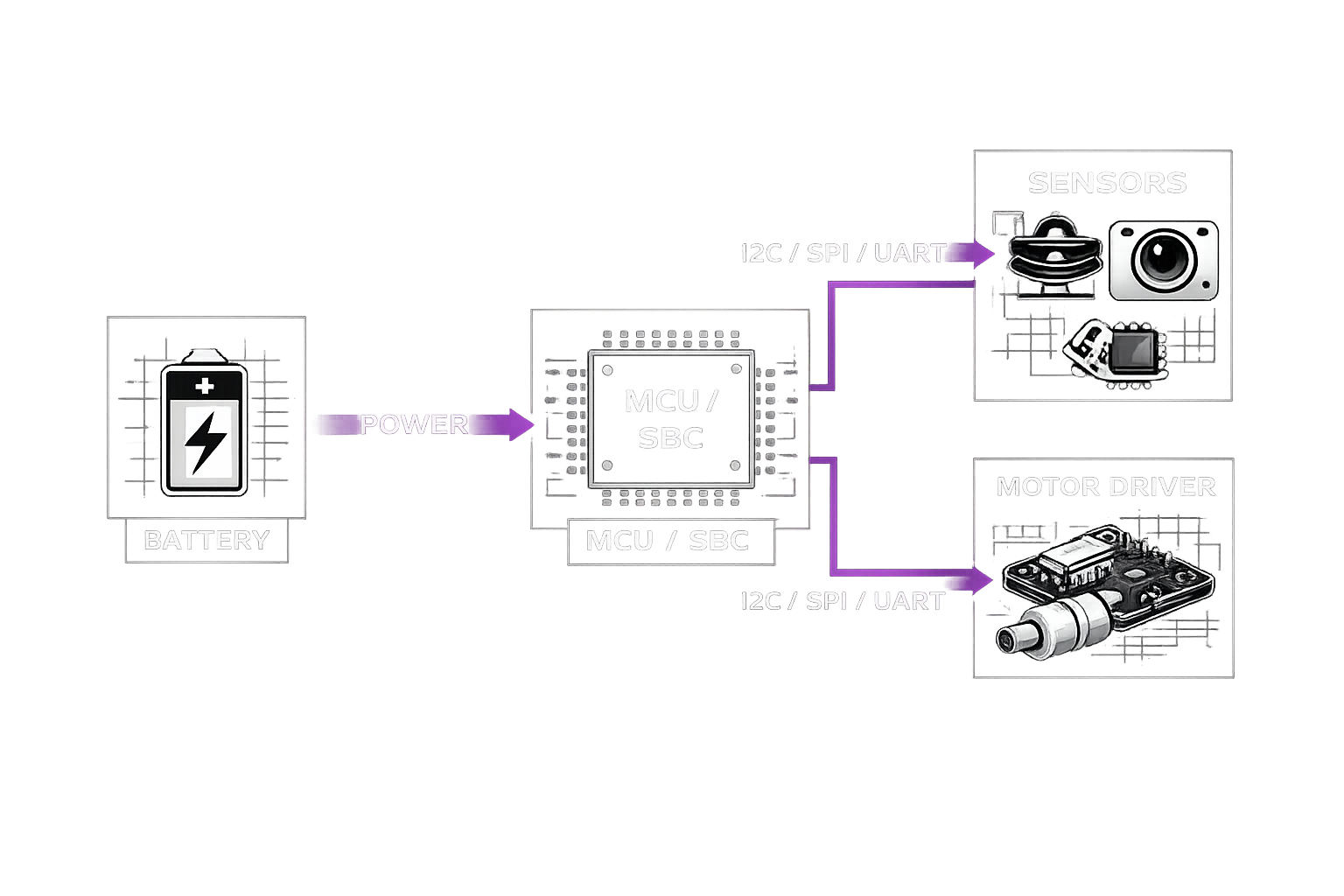
Robots depend on electronics to sense and act. Cameras, IMUs, LiDAR, ultrasonic sensors, encoders, and motor drivers all have to share power and communicate. Even when parts are plug and play, systems fail because of wiring, voltage mismatches, noise, weak grounding, or bad connections. Learn the basics of I2C, SPI, UART, and power budgeting. You do not need to be an expert on day one, but you do need to be able to connect parts and debug.
4) Mechatronics: Motion, Torque, and Mechanics
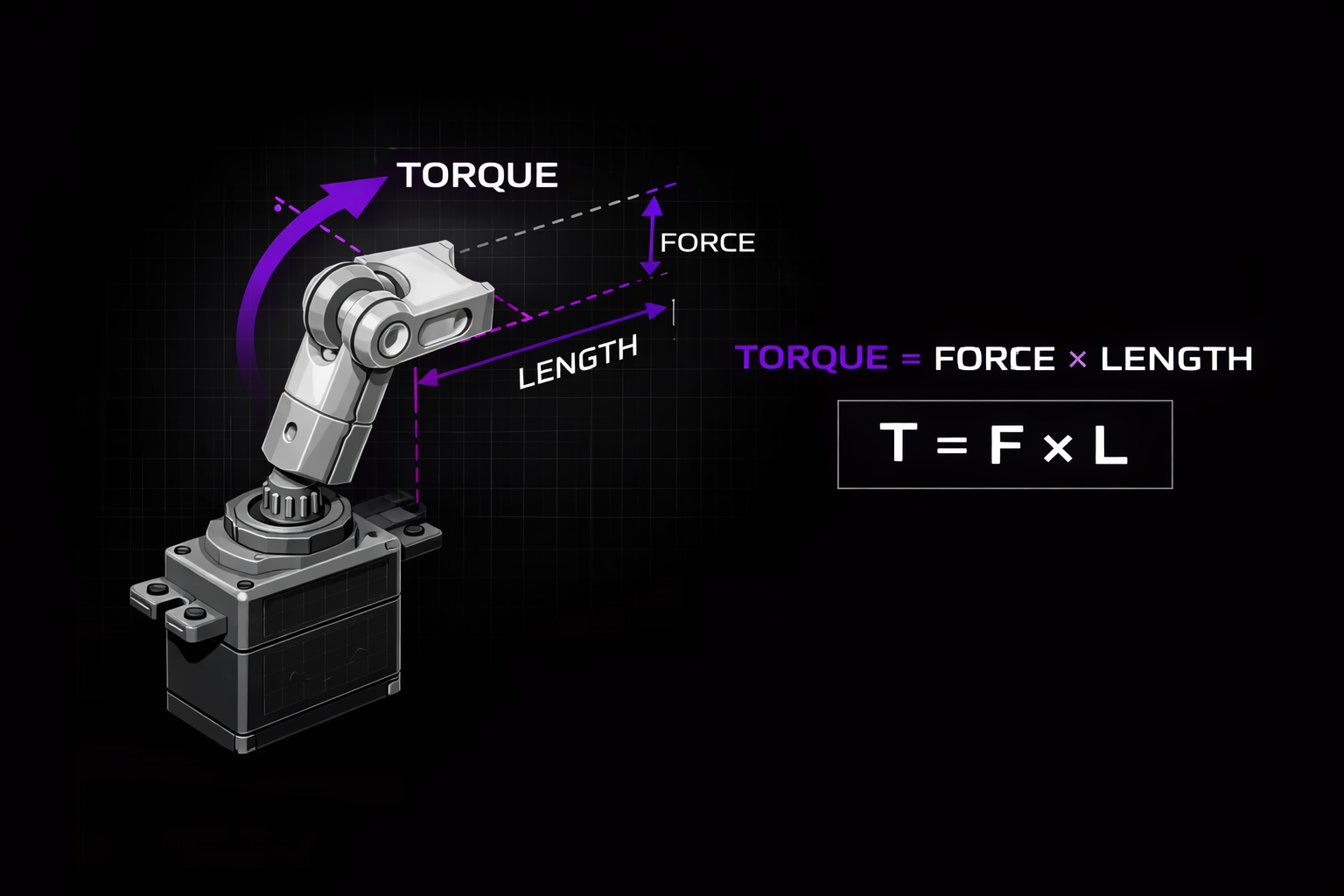
Mechatronics is where robotics becomes real. It is how your robot moves and how its body supports that movement. Wheels, joints, servos, motors, gear ratios, chassis stiffness, traction, and weight distribution all matter. Torque is not a detail. It decides whether your robot can lift, turn, climb, or even start moving. Learn how to reason about torque, mass, and center of gravity early. It saves you time later.
5) AI and Machine Learning for Robotics: Perception and Autonomy
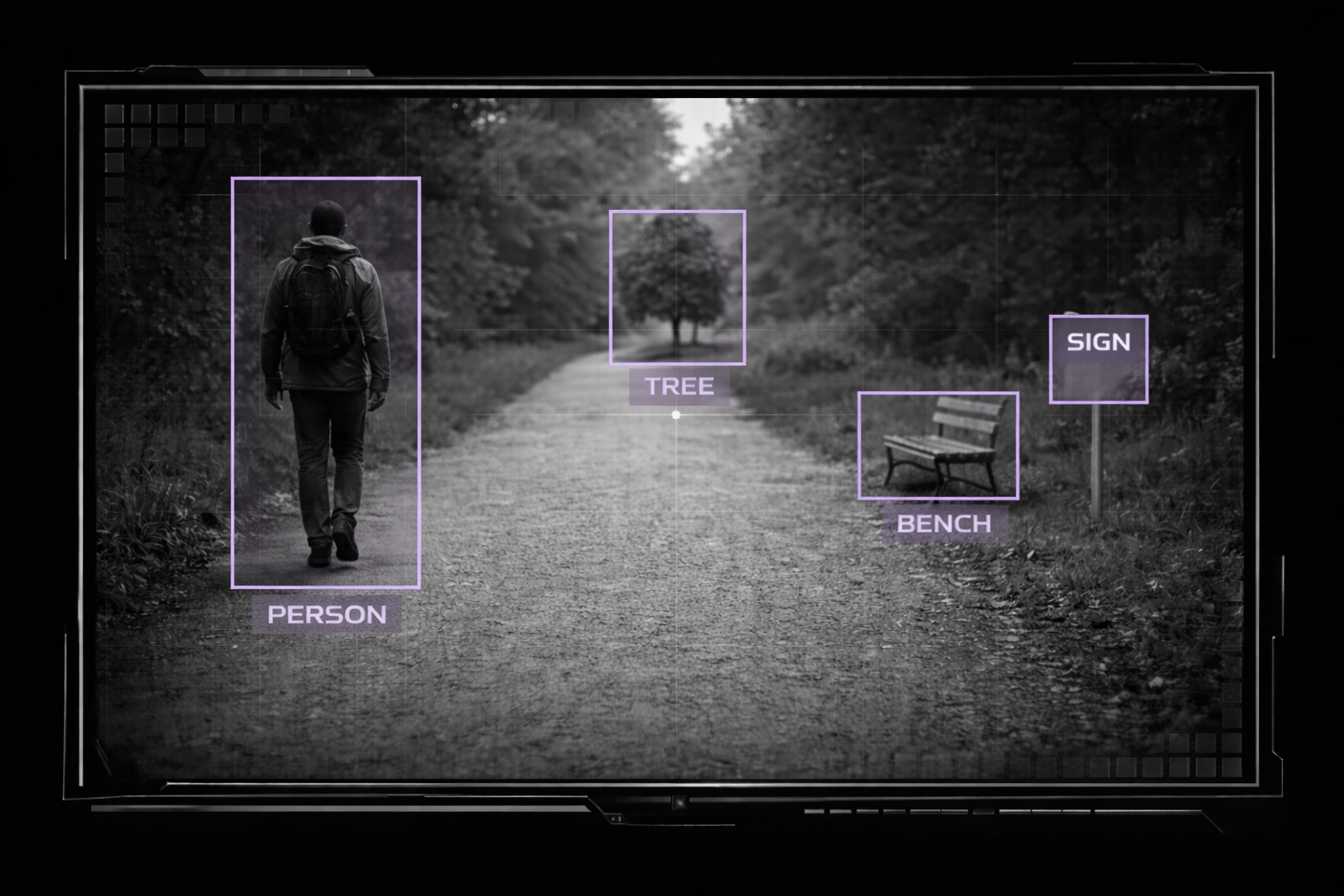
AI is not required for every robot, but it is a major advantage for perception. Machine vision is a clear example. If a robot can recognize obstacles, people, and landmarks, it can navigate with more confidence. AI also adds constraints. You need data, compute, and a plan for latency and failure cases. The goal is not “use AI everywhere.” The goal is to use it where it gives you a real capability jump.
Bonus Foundation: Math Competency
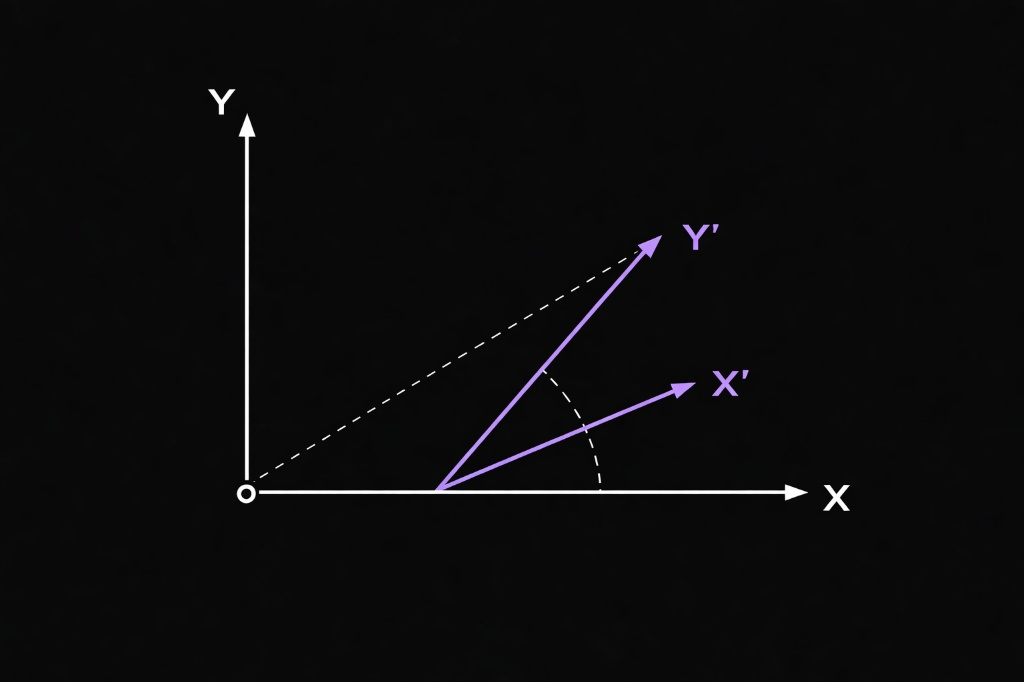
Math shows up everywhere in robotics and AI. You do not need advanced math to begin, but you should build comfort with the basics. Algebra and trigonometry help you reason about angles, distances, and simple geometry. Vectors and matrices show up in coordinate frames, rotations, and camera geometry. Basic calculus and probability show up in machine learning, optimization, and uncertainty.
The best way to learn math is to learn it through projects. Use trigonometry to compute heading and turn angles. Use vectors to represent motion. Use matrices to understand transformations. If you can explain what the robot thinks its position is and why it is wrong, you are already using the right math. The goal is practical fluency, not memorization.
Concluding Thoughts
If you are starting today, treat robotics like a ladder. Get comfortable with diving into unfamiliar technologies. Learn to write behavior loops. Learn enough electronics to integrate sensors. Learn enough mechanics to make motion predictable. Use AI when it adds real capability. Build math steadily in the background. This combination is what turns “I like robots” into “I can build robots.”
At Shadowless Labs we care about this because robotics should be accessible. Our goal is to ship learning-first co-existence bots that people can understand, modify, and own. If you want more guides like this, plus build logs and release notes, join the archive and follow along.